

煤仓配舱协同作业机器人
发布时间:2025-06-17编辑: 本站编辑
 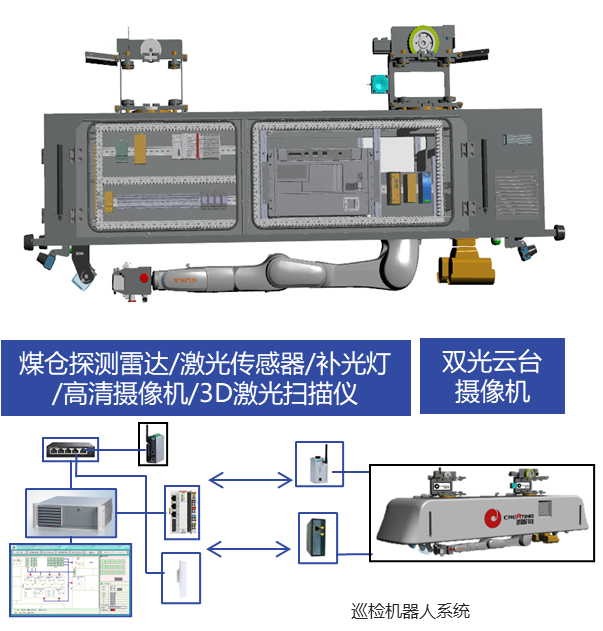 |
结构组成
◆系统由机器人、充电桩、轨道、调度中心组成 ◆机械臂可自由搭载工业相机、3D扫描仪、高清相机、红外成像仪、粉尘传感器等多种负载; ◆系统采用无线网络与调度中心实时通信 |
|
|
|


|
功能 ◆支持SLAM导航定位; ◆依托超声波雷达的避障算法系统; ◆搭载电磁波料位计,实现煤仓仓扣料位的检测,协同犁煤器换仓作业; ◆搭载热成像仪、粉尘、温湿度等传感器实现环境数据的采集; ◆搭载声音采集器,实现对托辊异常噪声的分析; ◆搭载高清相机,实现对巡检路线上的撒煤检测; |